
Projects
This page is still under construction !
MatSwarm
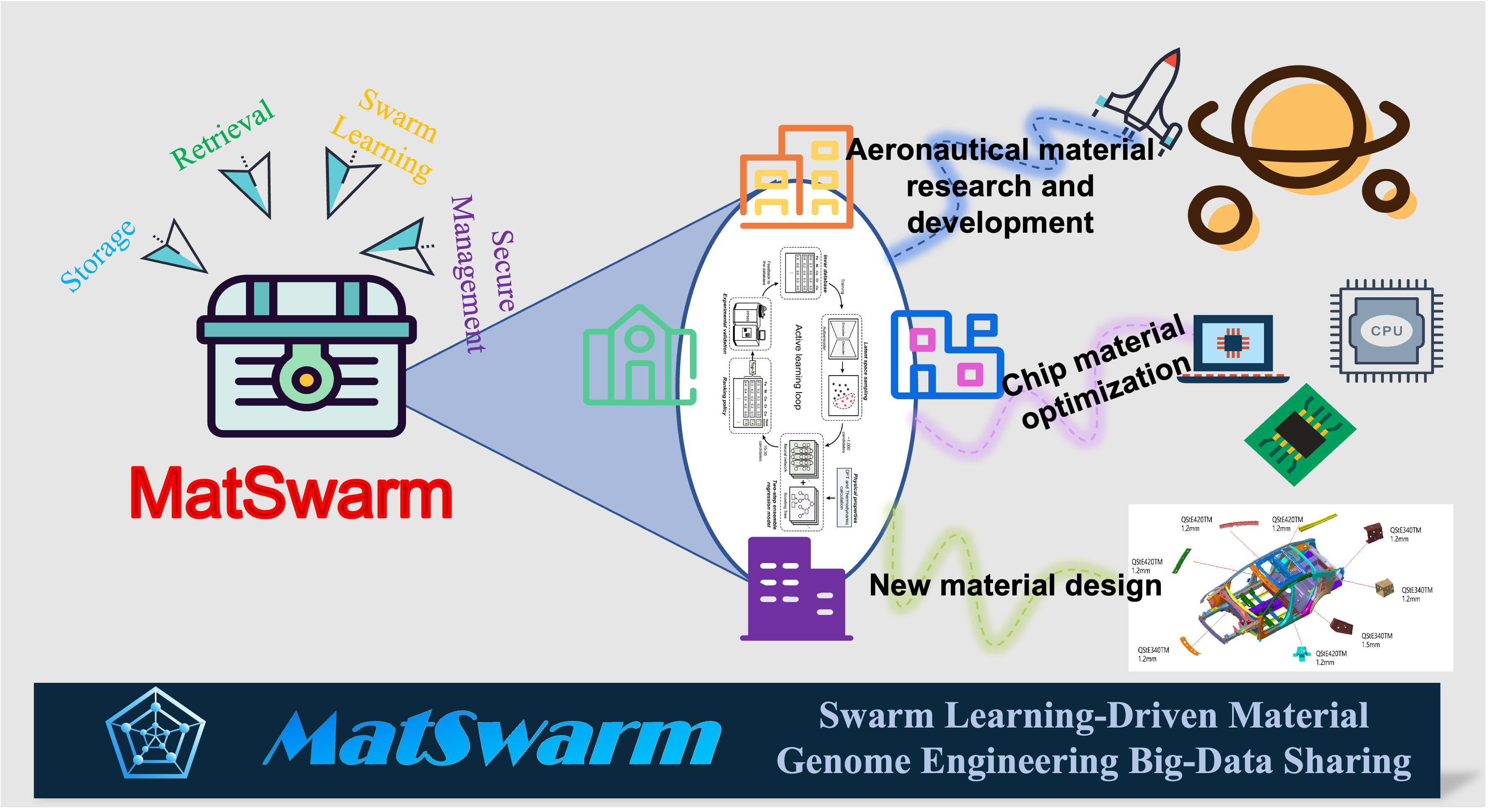 The rapid evolution of Industry 4.0 demands seamless collaboration among material research institutions to speed up advanced material discovery. The current platforms struggle with integrating large-scale, heterogeneous datasets, leading to data silos that hinder collaboration and innovation. The University of Science and Technology Beijing addresses these challenges through the National Material Data Management and Services (NMDMS) platform, which aggregates over 14 million material data entries from 30+ institutions, supporting high-throughput experimentation and collaborative research in materials genomic engineering. Key to this platform’s success is its advanced data normalization, distributed storage, and blockchain-based middleware, which ensures secure, cross-institutional data sharing. The MatSwarm framework further enhances this environment by introducing swarm transfer learning to boost model accuracy and generalization on non-i.i.d. data. NMDMS stands as a pioneering tool in materials research, driving innovation and fostering secure, efficient, and collaborative materials computation across institutions.
The rapid evolution of Industry 4.0 demands seamless collaboration among material research institutions to speed up advanced material discovery. The current platforms struggle with integrating large-scale, heterogeneous datasets, leading to data silos that hinder collaboration and innovation. The University of Science and Technology Beijing addresses these challenges through the National Material Data Management and Services (NMDMS) platform, which aggregates over 14 million material data entries from 30+ institutions, supporting high-throughput experimentation and collaborative research in materials genomic engineering. Key to this platform’s success is its advanced data normalization, distributed storage, and blockchain-based middleware, which ensures secure, cross-institutional data sharing. The MatSwarm framework further enhances this environment by introducing swarm transfer learning to boost model accuracy and generalization on non-i.i.d. data. NMDMS stands as a pioneering tool in materials research, driving innovation and fostering secure, efficient, and collaborative materials computation across institutions.
PhySwarm
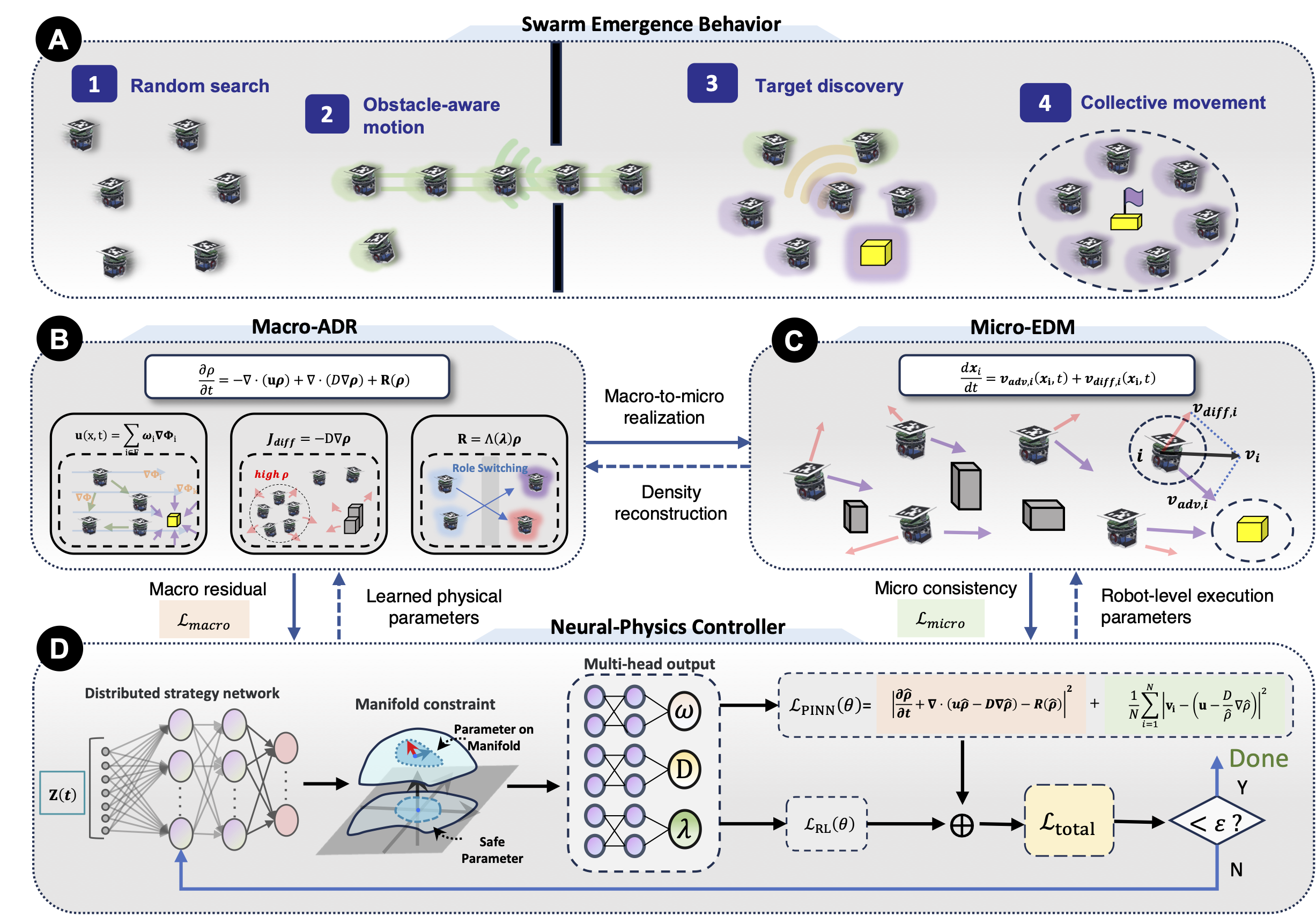 Robot swarms can exhibit coherent collective behaviors through local perception, limited communication and decentralized decision-making, yet modeling and controlling such emergence remains challenging when behaviors unfold over multiple phases. Here we introduce PhySwarm, a physics-informed micro–macro framework that represents multi-stage swarm emergence as physically constrained density-field evolution coupled to executable robot motion. At the macroscopic level, a multi-phase advection–diffusion–reaction model (Macro-ADR) describes phase-dependent swarm-density evolution through directed transport, diffusion-based spatial regulation and behavioral phase transitions. At the microscopic level, a Microscopic Equivalent Deterministic Motion model (Micro-EDM) realizes these mechanisms through potential-field advection, density-gradient compensation and rate- or event-gated phase switching. A Neural-Physics Controller maps local observations and temporal memory to bounded physical parameters and is trained with a reinforcement learning–PINN objective. In proof-of-concept swarm missions, including trail-guided foraging, formation-reconfigurable navigation and role-adaptive search and rescue, PhySwarm generates distinct multi-stage emergent behaviors within a unified physics-informed modeling framework.
Robot swarms can exhibit coherent collective behaviors through local perception, limited communication and decentralized decision-making, yet modeling and controlling such emergence remains challenging when behaviors unfold over multiple phases. Here we introduce PhySwarm, a physics-informed micro–macro framework that represents multi-stage swarm emergence as physically constrained density-field evolution coupled to executable robot motion. At the macroscopic level, a multi-phase advection–diffusion–reaction model (Macro-ADR) describes phase-dependent swarm-density evolution through directed transport, diffusion-based spatial regulation and behavioral phase transitions. At the microscopic level, a Microscopic Equivalent Deterministic Motion model (Micro-EDM) realizes these mechanisms through potential-field advection, density-gradient compensation and rate- or event-gated phase switching. A Neural-Physics Controller maps local observations and temporal memory to bounded physical parameters and is trained with a reinforcement learning–PINN objective. In proof-of-concept swarm missions, including trail-guided foraging, formation-reconfigurable navigation and role-adaptive search and rescue, PhySwarm generates distinct multi-stage emergent behaviors within a unified physics-informed modeling framework.